
home | introduction | participants | publications | links | internal |
|
Integrated Chassis ControlThe development of Integrated Chassis Control (ICC) systems is a major area of current interest in automotive research. Roughly speaking, research on this topic has been motivated by the desire for increased vehicle safety, increased comfort, and better performance by taking into account and utilising the interactions that exists between the different subsystems of the vehicle. While research on this topic has progressed along several lines of inquiry, it appears to be the case that almost no effort has been devoted toward the construction of vehicle emulators that are based on ICC concepts. For example, vehicles equipped with active systems (4-wheel-steering, active suspension, active brakes, etc.) may, in principle, be constructed to emulate any reasonable given set of vehicle dynamics. Arguments for the design of such vehicle emulators are compelling. In particular, vehicle designers should in principle be able to use vehicle emulators to test prototypes before their construction and at a lower expense than by using vehicle simulators and actual prototype vehicles.
Currently, a vertical dynamics emulator is being developed in parallel with the modelling of an hydropneumatic suspension.
|
Integrated Chassis Control |
|
|
|
webmaster:
|
|
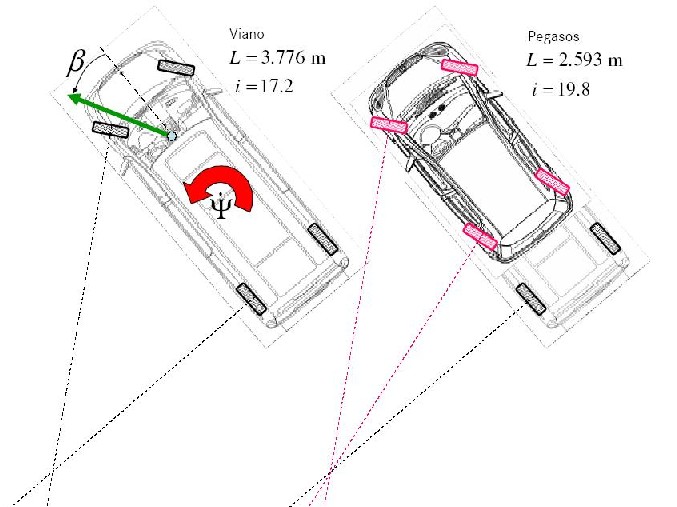 The objective of our research is to develop an ICC with
the capacity to emulate a vehicle with a given set of vertical and
lateral dynamics using the vehicle suspension and steering systems
(and taking into account the interaction between these systems). As a first step in this direction we have reviewed work that has been carried out in ICC; with particular emphasis on work that integrates both suspension and steering subsystems. Besides, a review of suspension and steering control systems and their interactions was realized. A 4-wheel-steering controller developed at the Hamilton Institute was developed and has been successfully implemented in two test vehicles from DaimlerChrysler. Finally, an analysis of the emulation envelope of a vehicle with actuator contraints has been presented.
The objective of our research is to develop an ICC with
the capacity to emulate a vehicle with a given set of vertical and
lateral dynamics using the vehicle suspension and steering systems
(and taking into account the interaction between these systems). As a first step in this direction we have reviewed work that has been carried out in ICC; with particular emphasis on work that integrates both suspension and steering subsystems. Besides, a review of suspension and steering control systems and their interactions was realized. A 4-wheel-steering controller developed at the Hamilton Institute was developed and has been successfully implemented in two test vehicles from DaimlerChrysler. Finally, an analysis of the emulation envelope of a vehicle with actuator contraints has been presented.
