
home | introduction | participants | publications | links | internal |
|
Vehicle control for Active SafetyImproving driver and passengers safety by accident avoidance and accident mitigation is one of the most important long term research issues in the automotive industry. The main objective of this work package is to experimentally test and evaluate novel multivariable control and nonlinear state observervation approaches to stabilise cars close to the physical limits for increased active safety.Roll-over protectionThe main objective is the development of compensation strategies that prevent dangerous lateral acceleration and roll motion which may lead to rollover. Different actuator concepts will be considered such as brake-by-wire, steer-by-wire, active suspension, active stabilisors and combinations of those actuator concepts, however the main emphasis will be put on braking and active steering. The roll dynamics of a vehicle depend crucially on its mass and the position of its center of gravity. As difference to existing approaches (which follow a conservative worst case strategy) a load adaptive stabilisation control will be designed. It is assumed that information about the vehicle load is available from external estimators, the estimation error might be large in particular in the initial phase or in situations where there is not enough persistent excitation. Thus, uncertainties and errors in load estimation will have to be compensated by a combination of robust control and adaptation strategies. The rollover stabilisation should also work in critical situations where one or two wheels have already lost ground contact. Evaluation of the different methods will be carried out for a realisic simulation of a commercial van. In addition, the control system will be implemented in one of the experimental vehicles. The objective of the experimental evaluation will be to show that lateral acceleration and roll angle can be kept within pre-specified constraints.Collision avoidanceThe objective of this workpackage is to track the vehicle along a prescribed trajectory in order to avoid an impending collision. Possible scenarios for collision avoidance are
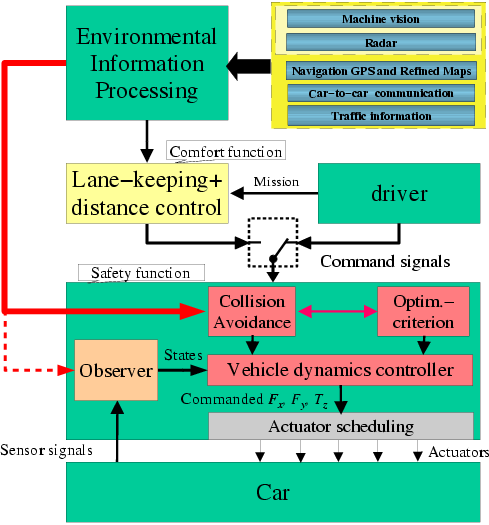 The normal operational mode of the vehicle is lane keeping and
speed/distance control achieved either manually or by an
autonomous cruise controller as a comfort function. At this level
the command signals for the subordinate control systems are
generated. In the event of automatically detecting an obstacle,
decision making and trajectory generation for collision avoidance
has to take place. On this level a set of possible reference
trajectories is generated for the vehicle dynamics controller. The
vehicle dynamics controller stabilises and tracks the system along
a reference trajectory at the same time taking into account and
adapting to the time varying road conditions. In particular,
changes in road friction will impose physical limits on the
achievable accelerations leading to constraints on the set of
realisable trajectories.
Collision avoidance heavily relies on
efficient obstacle detection and situation assessment algorithms based on environmental
information processing. This is currently the subject of extensive
research in the fields of image processing, sensor fusion,
communication etc. and will not be discussed here.
From the previous remarks it is evident that a fully operational collision avoidance system is outside the scope of the project in terms of project structure and resources. Only a sub-task of the
vehicle dynamics control problem will be considered in this project with the focus on developing enabling control technologies.
This task includes the generation of a physically feasible trajectory and the compensation of environmental disturbances such as changes in the road conditions. The states to be controlled are yaw rate, side slip angle and vehicle speed, the control inputs are the steering angle and the pressure at the four wheel brakes. Vehicle speed and
side slip angle are not directly measurable in production cars.
Control performance will thus crucially depend on reliable
methods of state estimation.
An automatic lane change close to the physical limits can be demonstrated using one of the test vehicles.
The designed controller will be experimentally verified by carrying out an automatic lane change manoeuvre at the physical limits using one of the test vehicles.
The normal operational mode of the vehicle is lane keeping and
speed/distance control achieved either manually or by an
autonomous cruise controller as a comfort function. At this level
the command signals for the subordinate control systems are
generated. In the event of automatically detecting an obstacle,
decision making and trajectory generation for collision avoidance
has to take place. On this level a set of possible reference
trajectories is generated for the vehicle dynamics controller. The
vehicle dynamics controller stabilises and tracks the system along
a reference trajectory at the same time taking into account and
adapting to the time varying road conditions. In particular,
changes in road friction will impose physical limits on the
achievable accelerations leading to constraints on the set of
realisable trajectories.
Collision avoidance heavily relies on
efficient obstacle detection and situation assessment algorithms based on environmental
information processing. This is currently the subject of extensive
research in the fields of image processing, sensor fusion,
communication etc. and will not be discussed here.
From the previous remarks it is evident that a fully operational collision avoidance system is outside the scope of the project in terms of project structure and resources. Only a sub-task of the
vehicle dynamics control problem will be considered in this project with the focus on developing enabling control technologies.
This task includes the generation of a physically feasible trajectory and the compensation of environmental disturbances such as changes in the road conditions. The states to be controlled are yaw rate, side slip angle and vehicle speed, the control inputs are the steering angle and the pressure at the four wheel brakes. Vehicle speed and
side slip angle are not directly measurable in production cars.
Control performance will thus crucially depend on reliable
methods of state estimation.
An automatic lane change close to the physical limits can be demonstrated using one of the test vehicles.
The designed controller will be experimentally verified by carrying out an automatic lane change manoeuvre at the physical limits using one of the test vehicles.
|
Vehicle Active Safety |
|
|
|
webmaster:
|
|
