C-TCP
Our basic idea is motivated by recent
work concerning Active Queue Management (AQM)
emulation from end-hosts using delay measurements, called
Probabilistic Early Response TCP (PERT) [1]. The basic
idea behind PERT is very simple and involves
responding to delay in a probabilistic rather than deterministic
manner. By judiciously selecting the manner of the probabilistic
response, Reddy et al. [1] are able to emulate, from
end-hosts, the behaviour of a range of AQM’s. To facilitate such AQM
emulation, each PERT flow probes the network for
congestion as a normal AIMD flow, but reduces its congestion
window in a probabilistic manner that depends on the estimated
network delay. We refer to this mechanism as a back-off
policy. The authors of PERT demonstrate that (in
principle) any AQM can be emulated by selecting the back-off
policy appropriately. The modified version of PERT (mPERT) [2] purports
to be a delay based protocol that solves the coexistence. However, it
was subsequently shown that mPERT algorithm fails to solve the
coexistence problem in a
satisfactory manner [3]. In particular, it is shown in
this latter paper that PERT can lead to high loss rates when
loss-based flows are present, and that the delay-based flows may
fail to revert to delay-based operation when the loss based
flows leave the network. Our main contribution here is to
present a similar idea that can be used to solve the coexistence
problem by carefully choosing the probabilistic back-off
function, while avoiding many of the side-effects of the PERT
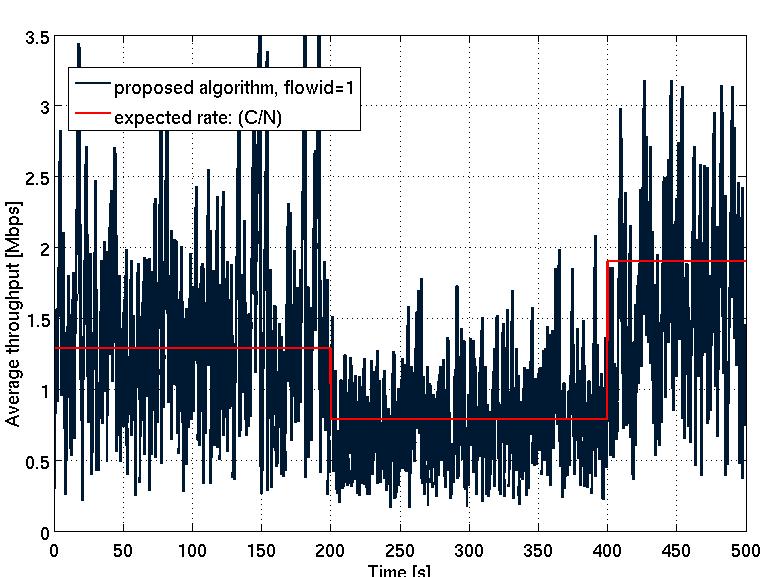
strategy. As we shall see our strategy, referred to as
Coexistent TCP (C-TCP) further in this article, avoids problems
of adjusting AIMD parameters, keeps the network loss rate
low when loss-based flows are present, and ensures that the
delay-based flows revert to delay-based operation when
loss-based flows are no longer present in the network
(termed here as on/off behaviour), even though these flows do not
attempt to sense the presence of such flows directly.
We select probabilistic back-off strategies of the form depicted in the figure below. As can be observed, the per-packet back-off probability function has two parts; a part that increases monotonically with the delay (Region A), and a part that decreases monotonically with delay (Region B).
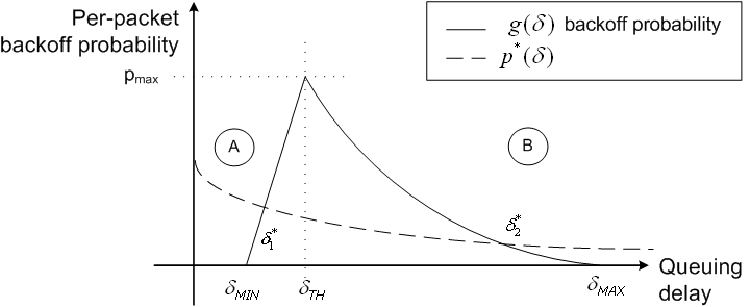
This form of AQM emulation has the
following properties:
- assuming that the maximum equilibrium loss rate (pmax ) is large enough, the network stabilises in Region A when only delay-based flows are present;
- when loss-based flows are present, the network is driven to Region B, and delay-based flows behave as loss-based flows due to the low per-packet back-off probability;
- when loss-based flows switch off, the network cannot stabilise in this region due to a backward pressure exerted by the probability function. Namely, as the flows experience back-offs, the queueing delay reduces, thereby increasing the per-packet back-off probability, thus making further back-offs more likely. This process continues until the network stabilises in Region A.
As can be seen, this type of strategy
should achieve coexistence of loss- and delay-based AIMD flows, without
a discernible increase in network loss rate. Furthermore, the
back-pressure described in (3) should ensure on/off behaviour.
A
detailed evaluation of C-TCP is presented in a series of articles
[3-5].
[2] K. Kotla and A. Reddy, “Making a delay-based protocol adaptive to heterogeneous environments,” in Proc. of 16th International Workshop on Quality of Service (IWQoS 2008), June 2008, pp. 100–109.
[3] Ł. Budzisz, R. Stanojevic, A. Schlotte, R. Shorten and F. Baker “On the fair coexistence of loss- and delay-based TCP,” Proc. of the 17th International Workshop on Quality of Service (IWQoS 2009) Charleston, SC, United States, July 2009.
[4] Ł. Budzisz, R. Stanojevic, R. Shorten and F. Baker “A strategy for fair coexistence of loss and delay-based congestion control algorithms,” IEEE Communications Letters, vol. 13, no. 7, p. 555-557, July 2009.
[5] Ł. Budzisz, R. Stanojevic, A. Schlotte, R. Shorten and F. Baker “Delay based congestion control for heterogeneous environments,” submitted to IEEE/ACM Transactions on Networking magazine, under evaluation.